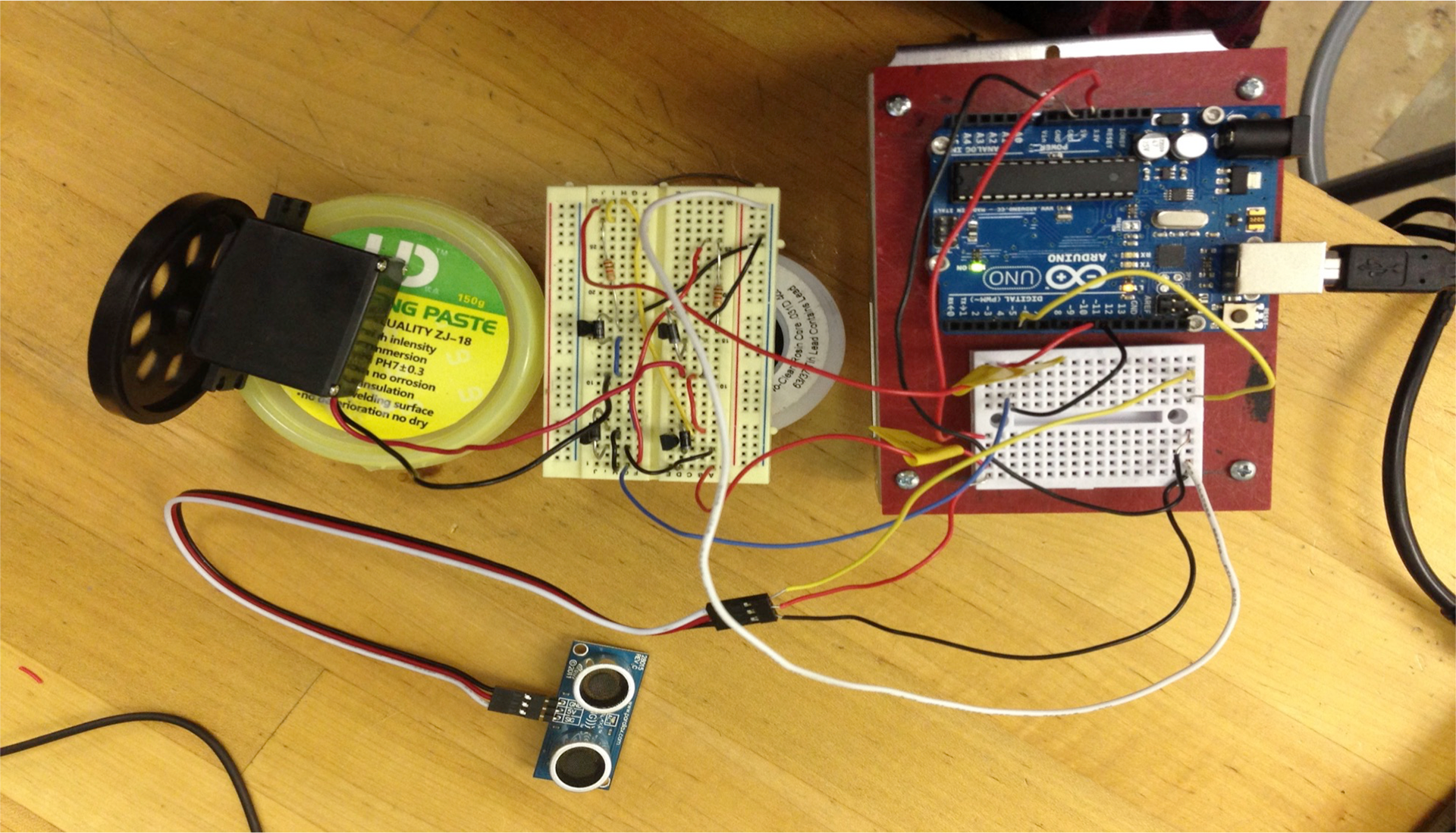
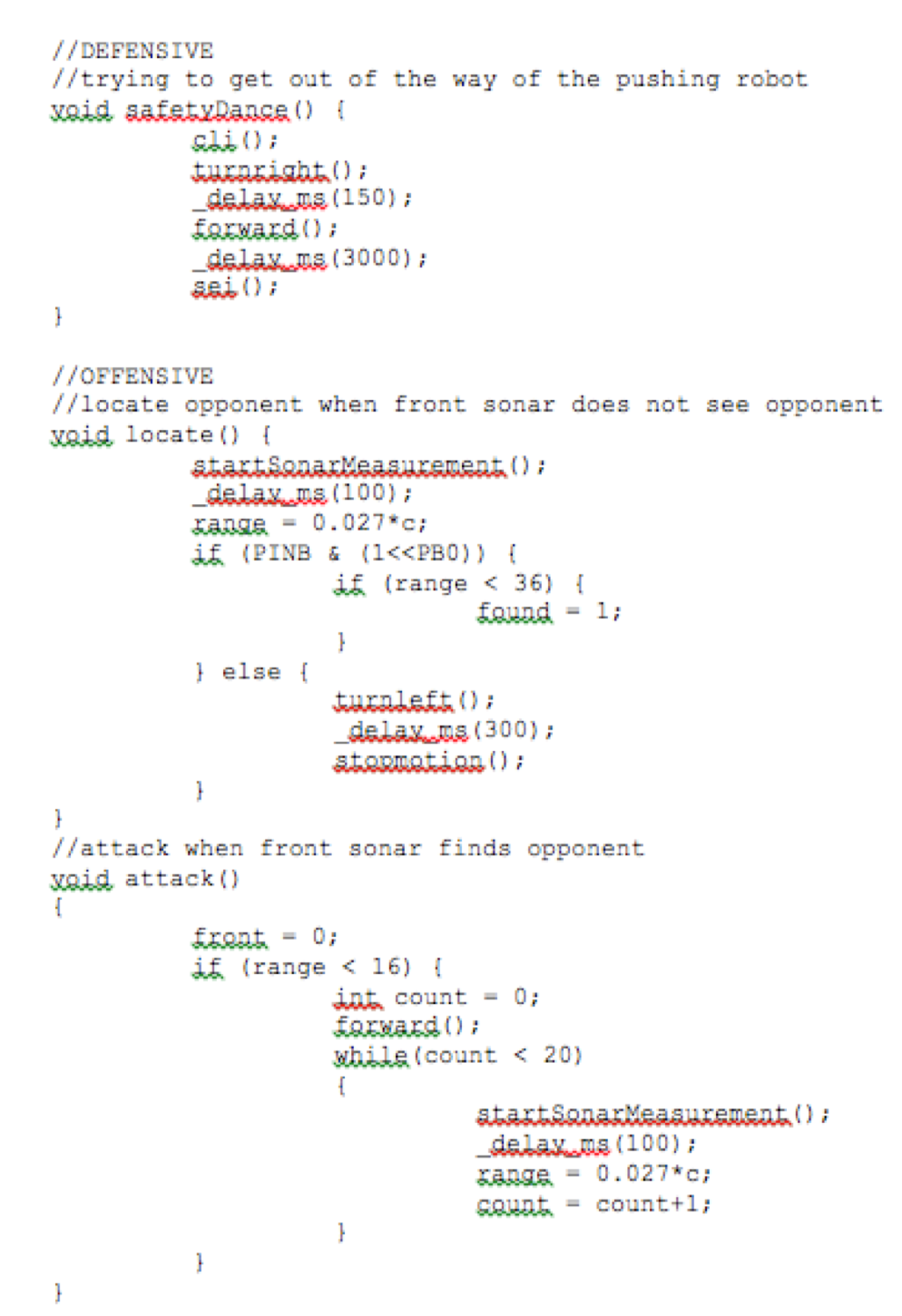
Our offensive and defensive mechanisms and strategies were implemented through the code, based on sensor readings. The defensive method “Safety Dance” uses a switch attached to a longer whisker to determine the proximity of the opposing robot and move our robot out of the way. When the opposing robot hit the whisker, it would close the switch and cause the robot to turn and move out of the way. The offensive method uses sonar to locate and attack the opposing robot, using a sliding platform to push it out of the ring.
For this project, I was the coding lead, supported my team members with circuit design, and was also responsible for soldering our circuit boards.
Below is a picture of our robot (black, closer to the foreground) at competition. Each battle round is three minutes and robots function autonomously during that time. Each battle is won when one robot or the other crosses the white boundary line. If everything is functioning properly, one robot should be able to push the other out of the ring.
At the competition, we were faced with technical difficulties. While we still managed to win two out of three of our "battles", at least one of the wins was due to the other robot's technical difficulties (it drove itself out of the ring). Though our robot passed all of the checkpoints (sensor and code tests) required to compete, our offensive strategies and mechanisms failed. Given more time for this extremely compressed project, I am sure every team's robot could have performed better.
